Para una persona cuya vida se ve afectada por una discapacidad causada por la pérdida o falta de algún miembro, la tecnología representa una esperanza, sin embargo una esperanza hasta hace una década demasiado costosa.
Si bien, con la biomecánica en conjunto con otras disciplinas, se han desarrollado prótesis, desde las más simples como las dentales hasta las más complejas como las que reemplazan huesos y extremidades, estas no siempre están al alcance de todos. Es preciso afirmar que están al alcance de muy pocos.
Los elevadísimos costos de la manufactura de las prótesis en el mercado, han llevado a emprendedores, como Gino Tubaro y Richard Van As, a desarrollar nuevas formas de poner al alcance de todos, prótesis funcionales y económicas. Así como ellos, muchos más le apuestan a la tecnología de impresión 3D.

Gino Tubaro, el joven que Obama puso como ejemplo
Antes de los 20 años, Gino Tubaro creó una prótesis de mano, que lo consagró como inventor, sin embargo, desde los 5 años mostró una gran pasión por la invención creando sus propios juguetes. A los 16, construyó una impresora 3D artesanal, y tiempo después creó la prótesis que ayudó a cientos de personas.
Siendo reconocido en marzo de este 2016, Gino se dio a conocer como uno de los representantes de esta innovadora y altruista tendencia de la impresión 3D para la creación de prótesis.
Como el mismo lo menciona, entre sus siguientes proyectos está construir una impresora 3D de costos reducidos, con los archivos de las prótesis cargados para poder enviarlos a Mozambique y otros países, así los niños pueden imprimir sus propias prótesis.

Gino, que actualmente estudia Ingeniería Electrónica en la UTM, señaló que uno de sus objetivos es crear mil prótesis de manera gratuita para aquellos que más la necesiten.

Gino lidera la producción de prótesis ortopédicas impresas en 3D. Hasta el día de hoy, se han creado 4 prototipos de prótesis de mano en su emprendimiento completamente funcionales y en uso.
El único momento en que la existencia de una tecnología adquiere verdadero sentido es cuando mejora la vida de las personas, y Robohand lo tiene presente, desde sus inicios en 2013, cuando Richard van As, tuvo la idea de poner prótesis de manos al alcance de pacientes con algún mal congénito.
Richard había perdido todos los dedos de la mano derecha en un accidente de trabajo y se dio cuenta de la poca eficiencia y alto costo de las prótesis convencionales. Así investigó hasta contactar a Iván Owen experto en efectos especiales mecánicos, con quien desarrolló su primer prototipo de prótesis impresa en 3D.

Owen y Van As han hecho sus diseños de condigo abierto, con esto, ellos los ponen al alcance de todos, permitiendo que puedan tener una opción más viable.
Las prótesis impresas en 3D, tienen su limitante por el momento, y es que dada la naturaleza de los materiales que se usan, solo pueden fabricarse prótesis externas, y que no son compatibles hasta el momento con el tejido humano a un grado aceptable.
No dudo que en un futuro seamos capaces de fabricar y sustituir cualquier miembro y órgano faltante en un paciente a bajo costo y de funcionalidad completa.
Para muchas de las personas afectadas por alguna discapacidad de cualquier naturaleza, la realidad es que se sienten incompletos, que les hace falta una pieza, ya sea una mano o un dedo. Si bien las prótesis pasivas proveen de gran alivio a estos pacientes, la verdad es que no hay diferencia que supla un miembro real y funcional.
Una prótesis pasiva es aquella que sustituye un miembro perdido, pero no está dotada de la funcionalidad de este, es decir solo son las piezas que no pueden imitar los movimientos de un dedo o una mano.
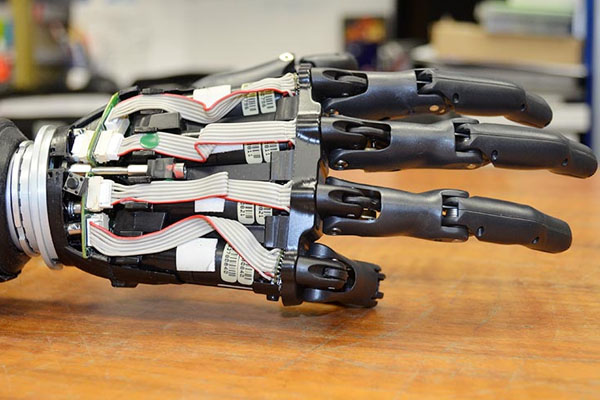
Pero los ingenieros de la Universidad Tecnológica de la Mixteca no se detuvieron ahí, así como otros, pensaron en dotar a las prótesis del movimiento que pueda suplir al miembro perdido en apariencia y funcionalidad.
En septiembre de 2016, durante el XXXIX Congreso Nacional de Ingeniería Biomédica, alumnos de la UTM en conjunto con profesores dela misma, presentaron su prototipo de una prótesis de mano activa, controlada por un MC y que censa señales electromiográficas mediante una pulsera colocada en el brazo, y realiza el movimiento usando servomotores.
Fuente: clarin — somib.org — gente.com
Martínez, A., Vargas, S., Merlín, E., Arias, M., Lugo, E., (2016). Control de Movimiento de una Mano Robótica Mediante Señales Electromiográficas. XXXIX Congreso Nacional de Ingeniería Biomédica